Проектирование функциональной схемы автоматизированного электропривода
Разрабатываемая система электропривода должна обеспечивать скалярное управление двумя тяговыми асинхронными двигателями в функции постоянства мощности. Схематично, требуемая характеристика приведена на рисунке 2.1.
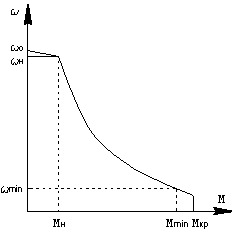
Рисунок 2.1 – Требуемая характеристика электропривода, P=const.
Для обеспечения требуемой характеристики проектируемый электропривод должен содержать генератор, вращаемый дизельным двигателем, неуправляемый выпрямитель и два преобразователя частоты, по одному на каждый тяговый двигатель. Система управления должна принимать в расчет режим работы самосвала (движение вперед, задний ход, нейтраль, динамическое торможение, режим холостого хода системы привода), потребляемую мощность, и скорость транспортного средства. Рабочее число оборотов дизельного двигателя – 650 об/мин или 1800/1900 об/мин, что соответствует дежурному режиму холостого хода и режиму полной нагрузки. Пониженная скорость вращения дизельного двигателя реализуется в тех случаях, когда самосвал перемещается без груза, то есть полная мощность не требуется. При более низком числе оборотов выходная мощность генератора ограничена приблизительно до 5% его номинальной мощности. Этого достаточно для обеспечения электропитания вспомогательного инвертора (для главного нагнетательного вентилятора) и нагревателей. При переходе к режиму полной мощности число оборотов двигателя увеличивается до максимального уровня так быстро, насколько это возможно с учетом ограничения выброса выхлопных газов и производства выходного крутящего момента. Это необходимо для достижения компромисса между временем реакции системы и управляемостью самосвала и настраивается при вводе самосвала в эксплуатацию таким образом, чтобы обеспечивать оптимальные рабочие характеристики.
Выход генератора питает 3-фазный диодный мост и заряжает конденсаторную батарею постоянного тока С, расположенную в шкафу управления, называемую также "канал связи постоянного тока". Для обеспечения полного скалярного управления соответствующим тяговым колесным двигателем каждый инвертор производит 3-фазное напряжение с переменой амплитудой и частотой. Энергия торможения подается обратно в канал связи постоянного тока и направляется тормозными прерывателями в решетки тормозных резисторов, где происходит ее рассеивание.
Блок управления тяговым приводом (БУТП) контролирует и управляет системой тягового привода в целом, включая управление числом оборотов двигателя, выходным напряжением генератора, крутящими моментами двигателей, токами прерывателя, напряжением в канале связи постоянного тока, системой защиты от пробуксовки и проскальзывания колес и охлаждающим вентилятором.
Для обеспечения требуемой характеристики постоянства мощности применяем обратные связи по скорости и току тяговых двигателей.
Функциональная схема электропривода приведена на рисунке 2.2.
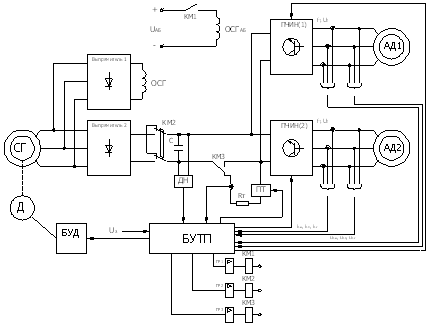
Рисунок 2.1 – Функциональная схема тягового электропривода самосвала
В основе системы управления лежит микроконтроллер, позволяющий осуществлять управление тяговыми электродвигателями в функции постоянства мощности, а также реализовывать защиту от перенапряжений и токов, превышающих номинальные значения. Для этого в системе присутствуют термодатчики, установленные на каждом блоке инвертора, а также непосредственно на тяговых двигателях. В случае, если на контроллер поступает сигнал о превышении допустимой температуры нагрева этих элементов, контроллер выдает команду на включение дополнительной вентиляции, а в случае, если нагрев критических элементов продолжается – контроллер принимает решение о принудительном выключении системы привода, с обеспечением наложения механического тормоза.
После поступления команды от оператора на запуск самосвала, контроллер дает команду блоку управления дизелем БУД на включение дизеля, а также подключает вспомогательную цепь возбуждения ОСГАБ синхронного генератора СГ, с помощью контактора КМ1 к аккумуляторной батарее самосвала. При этом генератор начнет вырабатывать некоторое напряжение, которое через выпрямитель 1 поступает на основную обмотку возбуждения генератора ОСГ. Одновременно через выпрямитель 1 происходит подача напряжения на конденсатор С и на инверторы напряжения. При поступлении сигнала с датчика напряжения звена постоянного тока ДН сигнала, о достижении номинального значения напряжения, микроконтроллер отключает вспомогательную обмотку возбуждения ОСГАБ и синхронный генератор переходит в режим работы с самовозбуждением, подавая номинальное значение напряжения на вход выпрямителей.
После этого самосвал готов к началу работы, и при поступлении соответствующего задания требуемого момента на колесах Uу, начинает управлять преобразователями частоты первого и второго асинхронного двигателя.
Навигация
- Главная
- Проектирование автомобильной дороги
- Структура и функции амортизаторов
- Техническая эксплуатация автомобилей
- Гидравлические системы автомобилей
- Общее устройство коробки передач автомобиля
- Содержание дорог в зимний период
- Транспорт