Разработка принципа функционирования микропроцессорного блока
На рис. 2.2 представлена упрощенная схема системы управления
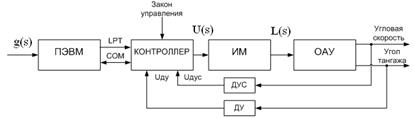
Рисунок 2.2 Упрощенная функциональная схема разрабатываемой системы
Принятые на рис. 2.2 сокращения:
ПЭВМ – персональная электронно-вычислительная машина;
КОНТРОЛЛЕР – устройство обрабатывающее информацию;
ИМ – исполнительный механизм;
ОАУ – объект автоматического управления;
LPT, COM – Каналы связи контролера и ПЭВМ;
UДУС – напряжение на выходе ДУС, В;
UДУ – напряжение на выходе ДУ, В;
Разработанная система имеет 2 последовательно расположенных контура управления: на управляющий вычислитель (контролер) приходит 2 сигнала (с ДУС и с ДУ), в свою очередь контролер должен формировать один сигнал управления на оба контура.
Вывод: контролер должен иметь 4 входа для приема и обработки сигнала информации, действующих значений управляемых параметров контура и один выход для передачи сигнала управления на контуры управления.
Навигация
- Главная
- Проектирование автомобильной дороги
- Структура и функции амортизаторов
- Техническая эксплуатация автомобилей
- Гидравлические системы автомобилей
- Общее устройство коробки передач автомобиля
- Содержание дорог в зимний период
- Транспорт