Анализ кинематической схемы, определение параметров и составление расчётной схемы автоматизированного электропривода
Z1- солнечная шестерня 1-го ряда; Z2 – сателлит 1-го ряда; Z3 – шестерня коронная 1-го ряда; Z4 - солнечная шестерня 2-го ряда; Z5 – сателлит 2-го ряда; Z6 – шестерня коронная 2-го ряда; 1- опорные подшипники; 2- монтажный цилиндр; 3- электродвигатель; 4- водило.
Опорные подшипники 1 колеса установлены на монтажном цилиндре 2, внутри которого размещен электродвигатель 3. Зазор между корпусом электродвигателя и монтажным цилиндром принят минимальным. Применен асинхронный электродвигатель с принудительным охлаждением.
Момент от электродвигателя по валу передается к солнечной шестерне первого ряда Z1. Здесь поток мощности разделяется на две составляющие. Одна часть мощности через сателлиты первого ряда Z2 поступает на коронную шестерню Z3, а другая часть мощности через водило 4, передается сателлитами второго ряда Z5 на коронную шестерню Z6. Коронные шестерни Z3, Z6 жестко связанны со ступицей мотор-колеса. Последняя является наружной опорой подшипников колеса.
Определяющее влияние на движение системы оказывают наибольшие массы и наименьшие жесткости связей. Поэтому одной из первых задач проектирования электроприводов является составление упрощенных расчетных схем механической части, учитывающих возможность пренебрежения упругостью достаточно жестких механических связей и приближенного учета влияния малых движущихся масс.
Для составления расчетной схемы механической части ЭП необходимо приведение всех параметров элементов кинематической цепи к одной расчетной скорости. Наиболее часто используется приведение их к скорости двигателя.
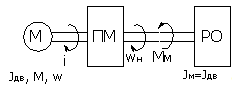
Рисунок 1.5 - Кинематическая схема электропривода
Двигатель М служит для преобразования электрической энергии в механическую энергию.
Преобразовательный механизм ПМ осуществляет передачу вращения от вала двигателя к валу рабочего органа. При помощи этого механизма происходит понижение скорости и соответственно повышение вращающего момента ведомого вала по сравнению с ведущим. Рабочий орган РО преобразует подведенную к нему механическую энергию в полезную работу.
Пренебрегая влиянием упругих связей, представим механическую часть простейшей расчетной схемой – жестким приведенным звеном. В этом случае многомассовая механическая часть ЭП заменяется одной эквивалентной массой с моментом инерции JS на которую воздействуют электромагнитный момент двигателя М и суммарный приведенный к валу двигателя момент нагрузки Мс (рис. 1.6).
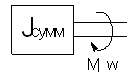
Рис.1.6 - Одномассовая модель ЭП
На пневмоколесных машинах применяются основные и вспомогательные трансмиссии. Первые обеспечивают полный диапазон регулирования скорости и тягового усилия в двигательном режиме, а вторые – частичный диапазон регулирования в короткие промежутки времени. В качестве основных применяются механические, гидромеханические, гидродинамические, гидрообъемные и электрические трансмиссии.
Основным недостатком механических трансмиссий является ступенчатое изменение скорости, осуществляемое для использования полной мощности источника энергии при изменении тягового усилия, определяемого сопротивлением движению машины. Помимо этого, при переключениях передач тяговое усилие исчезает вследствие разрыва силового потока в трансмиссии.
Навигация
- Главная
- Проектирование автомобильной дороги
- Структура и функции амортизаторов
- Техническая эксплуатация автомобилей
- Гидравлические системы автомобилей
- Общее устройство коробки передач автомобиля
- Содержание дорог в зимний период
- Транспорт