Кинематический и динамический расчет
mшк=0,725∙ mш = 0,725∙3,804=3,11 кг.
Массы, совершающие возвратно-поступательные движения:
mJ=mП+ mШП =3,804+1,181=4,985 кг
Массы, совершающие вращательное движение:
mR=mK+2mШК=3,682+2∙3,11=9,902 кг
В случае системы шатунов прицепного сочленения (рис. 6.4), сперва масса прицепного шатуна заменяется двумя массами: одна из них считается сосредоточенной на оси пальца поршня:
 , кг
, кг
а другая – на оси пальца прицепного шатуна, укрепленного в головке главного шатуна:
![]() , кг
, кг
Средний радиус проушин пальцев прицепных шатунов определяется по формуле:
 , м
, м
В качестве упрощения расчета разрешается принимать rср=r, получаем, что r = 0,056 м.
Для шатунного механизма звездообразного двигателя масса шатуна, отнесенная к поступательно-движущимся частям, может быть определена по формуле:
 , кг
, кг
Исходя из полученных данных можем определить массу шатуна, отнесенную к вращательно-движущимся частям:
![]() , кг
, кг
Силы инерции
Силы инерции, действующие в кривошипно-шатунном механизме (рис. 6.5.), в соответствии с характером движения приведенных масс подразделяют на силы инерции поступательно движущихся масс Рj и центробежные силы инерции вращающихся масс C.
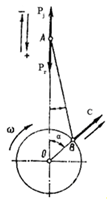
Рис. 6.5. Схема действия инерционных сил в кривошипно-шатунном механизме.
Сила инерции от возвратно-поступательно движущихся масс:
![]() , H
, H
где
![]() , кг
, кг
Масса поступательно-движущихся частей в цилиндре с прицепным шатуном равна:
![]() , кг
, кг
Суммарные силы, действующие в кривошипно-шатунном механизме:
![]() , Н
, Н
Результаты сведены в таблицу 6.2.
Для звездообразных двигателей, у которых к главному шатуну присоединяются несколько прицепных шатунов центробежная сила инерции вращающихся масс находится по формуле [2]:
C= -Mвр.ш.·Rω2 =10,3·0,0625∙219,9=-31,245, кН
Суммарные силы, действующие в кривошипно-шатунном механизме

Рис. 6.6. Разложение сил по элементам кривошипно-шатунного механизма.
Суммарные силы, действующие в кривошипно-шатунном механизме (рис. 6.6), определяют алгебраическим сложением сил давления газов и сил возвратно-поступательно движущихся масс:
![]() , кН
, кН
Суммарная сила Рс, как и силы Рг и Рj, направлена по оси цилиндра и приложена к оси поршневого пальца. Воздействие от силы Рс передается на стенки цилиндра перпендикулярно его оси и на шатун по направлению его оси. Результаты сведены в таблицу 6.2.
В цилиндре с прицепным шатуном суммарная сила определяется по аналогичной формуле:
![]() , кН
, кН
В случае кривошипно-шатунного механизма с центральным сочленением полученная суммарная сила Pc разлагается на две силы N и K’.
Сила N, действующая перпендикулярно оси цилиндра, называется нормальной силой и воспринимается стенками цилиндра:
![]() , кH
, кH
Нормальная сила N считается положительной, если создаваемый ею момент относительно оси коленчатого вала направлен противоположно направлению вращения вала двигателя.
Навигация
- Главная
- Проектирование автомобильной дороги
- Структура и функции амортизаторов
- Техническая эксплуатация автомобилей
- Гидравлические системы автомобилей
- Общее устройство коробки передач автомобиля
- Содержание дорог в зимний период
- Транспорт