Кинематический и динамический расчет
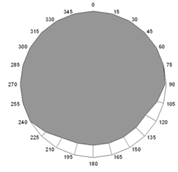
Рис. 6.15. Диаграмма износа 1-ой коренной шейки.
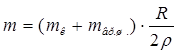
Уравновешенным двигателем называется двигатель, оказывающий постоянную по величине и направленную нагрузку на узлы его крепления. Полного уравновешивания двигателя достичь невозможно, так как суммарный крутящий момент двигателя и реактивный момент всегда переменны. Сила тяги вентилятора, силы реакции выхлопных газов и движущихся жидкостей, изменяются мало и на уравновешенность двигателя практически не влияют.
Наиболее значимыми в плане уравновешивания являются:
Рj1 - сила инерции первого порядка возвратно-поступательно движущихся масс;
Рj2 - сила инерции второго порядка возвратно-поступательно движущихся масс;
KR - центробежная сила инерции вращающихся масс;
Мj1 - момент от сил инерции первого порядка;
Мj2 - момент от сил инерции второго порядка;
МС - момент от центробежных сил инерции вращающихся масс.
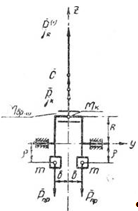
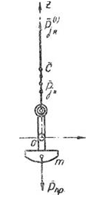
Рис. 6.16. Схема сил инерции, действующих в однорядном звездообразном двигателе
Центробежные силы инерции вращающихся масс колена вала и шатунного механизма уравновешиваются противовесами, расположенными на продолжении щек. Величина этих противовесов может быть определена по формуле:
 ,
,
где mк – масса кривошипа, mвр.ш. – масса вращательно-движущейся части шатуна;
Перейдем к исследованию уравновешивания сил инерции первого порядка поступательно-движущихся масс. По оси главного цилиндра действует сила инерции первого порядка:
![]() ,
,
которую условно можно заменить двумя эквивалентными вращающимися векторами ![]() и
и ![]() , величиной
, величиной
![]()
По оси n-го цилиндра с прицепным шатуном действует сила:
![]() ,
,
которую можно заменить двумя эквивалентными вращающимися векторами ![]() и
и ![]()
![]()
Прямой вектор ![]() располагается относительно оси n-го цилиндра под углом (α-γn), а обратный
располагается относительно оси n-го цилиндра под углом (α-γn), а обратный ![]() - под углом (α-γn)=(γn-α). Так как кривошип относительно оси n-го цилиндра находится под углом (α-γn), то направление прямого вектора An совпадает с направлением кривошипа.
- под углом (α-γn)=(γn-α). Так как кривошип относительно оси n-го цилиндра находится под углом (α-γn), то направление прямого вектора An совпадает с направлением кривошипа.
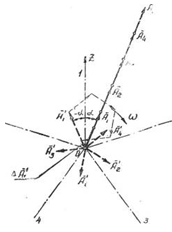
Рис. 6.17. Определение суммарных неуравновешанных сил инерции первого порядка звездообразного двигателя.
Если провести замену сил инерции первого порядка всех цилиндров вращающимися векторами (рис. 2.12), то окажется, что все прямые векторы наложатся на кривошип и их сумма будет:
Величина результирующего вектора:

Вектор  направлен по кривошипу, вращается вместе с ним с угловой скоростью коленчатого вала и может быть уравновешен увеличением массы противовесов, располагаемых на продолжении щек колена.
направлен по кривошипу, вращается вместе с ним с угловой скоростью коленчатого вала и может быть уравновешен увеличением массы противовесов, располагаемых на продолжении щек колена.
В случае симметричного колена можно определить массу противовесов по формуле [2]:
Навигация
- Главная
- Проектирование автомобильной дороги
- Структура и функции амортизаторов
- Техническая эксплуатация автомобилей
- Гидравлические системы автомобилей
- Общее устройство коробки передач автомобиля
- Содержание дорог в зимний период
- Транспорт