Анализ и синтез цифровой системы продольного канала автопилота
В данной работе рассмотрим систему управления угловыми параметрами движения, т.е. углом атаки и тангажа. Управление этими параметрами в режиме посадке имеет очень большое значение, так как любые их отклонения от заданных (требуемых) значений могут привести к катастрофе. СУ продольным каналом обеспечивает управление углами атаки и тангажа в зависимости от изменения угла и угловой скорости тангажа «9. Угол тангажа 19 измеряется с помощью малогабаритной гировертикали. Угловая скорость измеряется с помощью датчика угловой скорости (ДУС). Рассчитанные вычислителем управляющие воздействия отрабатываются рулем высоты с помощью сервопривода.
Структурно контур управления углами атаки и тангажа состоит из трех блоков, что можно представить в виде рис. 1.1.
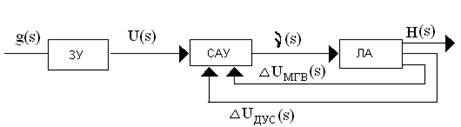
Рисунок 1.1- Функциональная схема системы управления углами атаки и тангажа
На рис.1.1 обозначено:
ЗУ - задающее устройство;
САУ - система автоматического управления;
ЛА - летательный аппарат.
Получение линеаризованной математической модели
Полет самолета можно представить в виде двух движений: движения центра масс по траектории и движения самолета как твердого тела относительно центра масс. В соответствии с этим полученные подсистемы уравнений, описывающие кинематику и динамику полюса твердого тела, формируют полную исходную систему уравнений состояний и допущений. Эта система включает в себя:
-3 уравнения кинематики полюса объекта;
-3 уравнения динамики полюса объекта;
-3 уравнения движения твердого тела относительно полюса или уравнения углового движения;
-3 уравнения кинематики углового движения.
В соответствии со спецификой исходных нелинейных уравнений наиболее удобными для линеаризации является метод малых возмущений.
Для дальнейшего формирования дифференциальных уравнений относительно возмущающих параметров состояния нужно сформировать систему требуемого или опорного движения на основе приведенной выше исходной системы уравнений.
Для решения системы уравнений требуемого движения используем заданный режим полета - снижение по глиссаде самолета. Режим представлен в виде совокупности законов изменения траекторных и угловых параметров объекта:
VT=VT(t); γAt=γaT; (1.1)
XCt=XCt(t); αT=αT(T);
YCt=YCt(t); γaT≡0;
ZCt≡0; ψaT≡0;
γT≡0; γT=γT(t); ψT≡0 βT≡0.
Подставляя эти зависимости в уравнения требуемого движения, получаем более простую систему уравнений опорного движения объекта. Решение системы уравнений требуемого движения сводится к определению параметров состояния, как функции времени: VT(t), VT(t), αT(t),γT(t). Для нахождения этих параметров решаем систему дифференциальных уравнений, т.е. уравнения 2,4, 5 и 14.
Для указанных выше параметров, подлежащих определению, с учетом режима полета получим систему следующего вида:
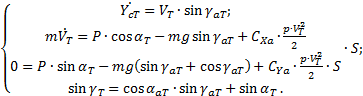 (1.2)
(1.2)
Так как в рассматриваемом режиме полета углы атаки и тангажа принимают достаточно малые значения, то заменяем sinαT(t)=αT и sinγT(t)=γT. Тогда:
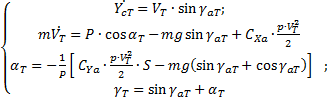 (1.3)
(1.3)
Применяя методы декомпозиции и малых возмущений к исходной системе уравнений ММ самолета, получим упрощенную линейную модель объекта управления, описывающую его продольное движение.
Продольное движение описывается следующими уравнениями:
Навигация
- Главная
- Проектирование автомобильной дороги
- Структура и функции амортизаторов
- Техническая эксплуатация автомобилей
- Гидравлические системы автомобилей
- Общее устройство коробки передач автомобиля
- Содержание дорог в зимний период
- Транспорт