Анализ и синтез цифровой системы продольного канала автопилота
В качестве блока УС1 и УС2 выбираем пропорциональные звенья. При выборе коэффициента для УС1 будем исходить из того, что напряжение питания потенциометрического измерителя МГВ равно ±27 В и максимальное выходное напряжение также равно ±12 В. Входное напряжение вычислителя напряжение - 10 В, поэтому:
Wус1,(S)=Кус1=10/13,5=0,74 В/В. (2.8)
Напряжение питания измерителя типа микросин ДУС равно 36 В, тогда дляУС2:
WУС2(S)=Кус2=10/36=0.278 В/В. (3.2)
Для усилителя: Wy(S)=Ку=Uву/δрв=10/0.262= 38.17 В/рад, (3.3)
где δрв - максимальное отклонение руля высоты,
Uву - максимальное выходное напряжение вычислителя.
В качестве передаточной функции сервопривода выберем апериодическое звено с постоянной времени Т=0.1 с:
![]() (2.9)
(2.9)
В качестве датчика угловых скоростей возьмем поплавковый ДУС с передаточной функцией колебательного звена:
![]() . (3.0)
. (3.0)
В качестве датчика угла ранее была выбрана малогабаритная гировертикаль, которая является пропорциональным звеном. Считаем измеряемый угол равным ± 12,5°, напряжение питания потенциометрических измерителей равным 27 В, а выходное напряжение равно ± 13,5 В, тогда:
Wмгв(S)=Кмгв=13,5/0.218= 61,93 В/рад. (3.6)
Закон управления имеет вид
δГВ=К1γ+ К2γ. (3.1)
Входной информацией для вычислителя являются сигналы с МГВ γ[kT0] и ДУСа wХ[kТ0], представляемые уровнем однополярного сигнала Uу,Uwx, в диапазоне 0 12В (на основании исходных данных). Это соответствует изменению крена в диапазоне углов -30° +30° и угловых скоростей в диапазоне - 0,5 .+0,5[рад/с].
Также входной является информация о заданном (требуемом) угла крена узад и требуемом значении высоты wхзад, принимая в последовательном коде в стандарте К.8-232.
Выходной информацией является однополярный сигнал Uγ управляющего воздействия, также приведенный к диапазону амплитуд 0 12В. Так же потребуется предварительная обработка -дифференцирование.
Поэтому для приёма и выдачи информации нам потребуется ЦАП и АЦП. Заданный период дискретности составляет Т0=0.04с=50000мкс. Стандартная тактовая частота используемого микроконтроллера МП ATmega8, следовательно, период импульсов для таймера МП ATmega8 составит Ти=1мкс. Максимальный интервал времени, реализуемый таймером Тмах=65535мкс. Поскольку Тмах>То, то данный период дискретности может быть реализован аппаратными средствами МП ATmega8.
Принципы проверки достоверности информации с датчиков не регламентируются, однако можно ввести проверку правильности передачи данных по последовательном интерфейсу на основе простейшего метода контроля бита четности количества единиц.
Конструкторская часть
Целью данной работы есть проектирование системы управления беспилотным транспортным средством в режиме посадки. Микроконтроллерный блок представляет собой микропроцессор с программой работы, которая реализует получение данных с датчиков системы, их обработку и передачу на компьютер.
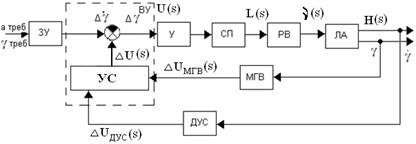
Рисунок 2.1- Функциональная схема системы управления углами атаки и тангажа
Навигация
- Главная
- Проектирование автомобильной дороги
- Структура и функции амортизаторов
- Техническая эксплуатация автомобилей
- Гидравлические системы автомобилей
- Общее устройство коробки передач автомобиля
- Содержание дорог в зимний период
- Транспорт