Анализ и синтез цифровой системы продольного канала автопилота
Рисунок 1.4Переходный процесс по γ
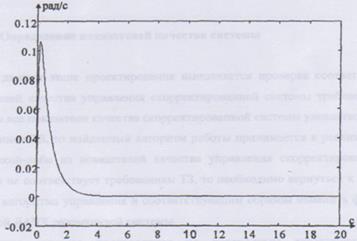
Рисунок1.5 Переходный процесс по ω
На данном этапе проектирования выполняется проверка соответствия показателей качества управления скорректированной системы требованиям ТЗ. Если все показатели качества скорректированной системы удовлетворяют требованиям ТЗ, то найденный алгоритм работы принимается к реализации. Если какой-либо из показателей качества управления скорректированной системы не соответствует требованиям ТЗ, то необходимо вернуться к этапу синтеза алгоритма управления и соответствующим образом изменить форму желаемой ЛАЧХ разомкнутой системы.
Оценка качества производится по переходным характеристикам замкнутой системы и по частотным характеристикам разомкнутой системы.
Рассмотрим переходные характеристики скорректированной замкнутой системы (рис 1.7 - 1.8). Оценим основные показатели качества управления: установившуюся ошибку εуст; длительность переходного процесса tnn и перерегулирование σ.
Установившуюся ошибку оцениваем по переходным характеристикам при I ≥ 0. Из рисунка следует, что Еуст=0. Требования по точности в установившемся режиме выполняются.
Переходный процесс считается закончившимся в тот момент времени, после которого переходная характеристика уже не выходит за пределы заданного поля допуска.
Для оценки длительности переходных процессов tnn рассмотрим рис 1.7. На рисунке проводим две горизонтальные прямые, ограничивающие поле допуска. Одну прямую проводим на уровне γуст + ∆γуст, другую – на уровне γ- ∆γуст, где γ- установившееся значение переходной характеристики по задающему воздействию, А =0,05 - величина, задающая поле допуска.
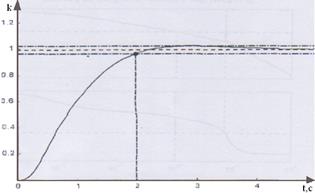
Рисунок 1.6 - Переходный процесс скорректированной системы
Из рис. 1.6 следует, что tnn =2c что удовлетворяет требования ТЗ, так как оно меньше допустимого, т.е. tnn < Зс.
Перерегулирование סּ (по задающему воздействию) определяем по формуле:
![]() (2.7)
(2.7)
Следовательно, требования ТЗ выполняются. При невыполнении этих требований необходимо расширить среднечастотный участок желаемой ЛАЧХ разомкнутой системы.
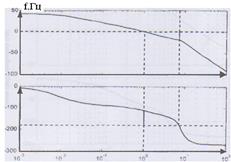
По логарифмическим частотным характеристикам разомкнутой системы L(w) и Ψ(w) находим запасы устойчивости по амплитуде L3=19.2 дБ и по фазе Ψ3=68.7 град. Эти показатели удовлетворяют требованиям ТЗ.
![]()
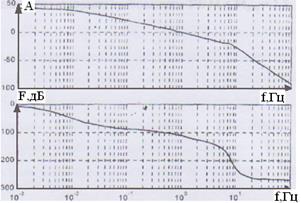
Рисунок 1.6 - Частотные характеристики замкнутой системы
Рисунок 1.8- ЛАЧХ и ЛФЧХ разомкнутой скорректированной системы
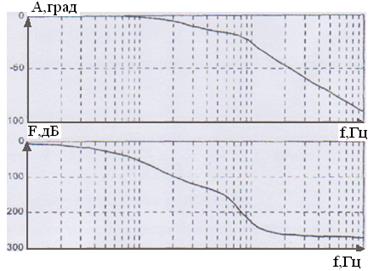
Рисунок 1.9 - ЛАЧХ и ЛФЧХ замкнутой скорректированной системы
По АЧХ замкнутой системы находим показатель колебательности:
М =Aзамкмач(w)/Азамк(0) = 1; частоту резонанса wрез=10 рад/с.
Эти показатели удовлетворяют требованиям ТЗ: М < Мдоп- 1.5.
Для данной системы управления самолёта в продольном движении используется пропорционально-дифференциальный закон управления, который повышает быстродействие системы и увеличивает запас устойчивости.
Для реализации закона необходимо сформировать алгоритм управления. В данной работе алгоритм реализуется управляющим вычислителем, схема которого представляет собой микропроцессорную систему.
Навигация
- Главная
- Проектирование автомобильной дороги
- Структура и функции амортизаторов
- Техническая эксплуатация автомобилей
- Гидравлические системы автомобилей
- Общее устройство коробки передач автомобиля
- Содержание дорог в зимний период
- Транспорт