Анализ и синтез цифровой системы продольного канала автопилота
Эта команда рассчитывает матрицу коэффициентов обратных связей К, для непрерывной модели с законом управления 8РB =К1γ + К2γ, которая минимизирует квадратичный критерий качества передаточной функции:
![]() (аосоо)(2.3)
(аосоо)(2.3)
Далее выполняем преобразование непрерывной модели в дискретную с экстраполятором нулевого порядка и находим решение по алгоритму синтеза дискретной системы.
Синтез параметров дискретной системы можно выполнить двумя способами.
Первый предполагает нахождение 2-передаточной функции приведенной непрерывной части системы, в которую входит экстраполятор нулевого порядка (ЭНП). Затем используется синтез в 2-плоскости. Второй способ предполагает синтез в S-плоскости, но с учетом динамических свойств ЭНП. Передаточную функцию ЭНП можно представить в следующем виде:
 (2.4)
(2.4)
Выберем для цифровой системы период дискретности, используя три метода.
1. Основан на теореме Котельникова:
![]() (2.5)
(2.5)
Значение wmах определяется из условия Lск(w) <-15 дБ на среднечастотном участке желаемой ЛАЧХ с наклоном -20дБ/дек.
![]() (2.6)
(2.6)
В этом методе период дискретности (Т) определяется из обеспечения устойчивости:
![]() (2.7)
(2.7)
где Ώт - максимальная скорость задающего воздействия;
М - колебательность;
εт - максимальное угловое ускорение.
![]() (2.8)
(2.8)
Из трех периодов дискретности выберем наименьший. Это облегчает условие устойчивости и приводит к повышению точности регулирования. Принимаем период дискретности Т<0.04с.
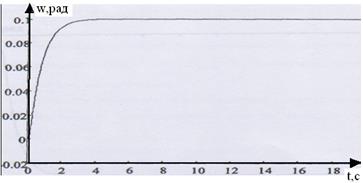
Так как все корни характеристического уравнения лежат в левой полуплоскости, то система устойчива, но, исходя из переходных процессов (рис.) показатели быстродействия не удовлетворяют требованиям ТЗ. Следовательно, необходима коррекция системы.
Под управляемостью самолета понимают способность изменять параметры своего движения при отклонении управляющих органов.
Система должна быть управляемой по состоянию, если ранг матрицы управляемости системы равен порядку системы.
Rank Uх=n> Uх=[Ь: АВ: .: Аn-1В].
С помощью пакета МАТLАВ получим: U=сtгb(АB)> а затем, используя команду rank(U), получаем, что ранг равен 3, следовательно, система полностью управляемая.Система является полностью наблюдаемой, если ранг матрицы наблюдаемости равен порядку системы:
Rank Q = n.
О- [Ст: АТСТ: .: (AТ n-1СТ]; Q = obsv(А,С).
Командой Rank(Q) определяем ранг матрицы наблюдаемости, он равен 3, значит, система полностью наблюдаема.
На основе анализа динамических характеристик можно сделать вывод, что ОУ устойчив. Переходные процессы, представленные на рис. 1.3, 1.4, 1.5, не обладают требуемым качеством, и время переходных процессов превышает заданное. Таким образом, для уменьшения времени переходного процесса в закон управления введем пропорциональную составляющую, а для достижения лучшего качества управления ЛА
Введем дифференциальную составляющую. Значит, в качестве первичного закона управления выбираем пропорционально-дифференциальный закон управления по γ и γ, который имеет такой вид ![]() -
-
Навигация
- Главная
- Проектирование автомобильной дороги
- Структура и функции амортизаторов
- Техническая эксплуатация автомобилей
- Гидравлические системы автомобилей
- Общее устройство коробки передач автомобиля
- Содержание дорог в зимний период
- Транспорт